- Published on
值分布强化学习 Distributional Reinforcement Learning
- Authors

- Name
- ZHOU Bin
- @bzhouxyz
这个分支的几篇paper倒是有点意思。我们知道,RL的很多问题中,一旦中有一个是non-deterministic,那么必然会使得也应该是non-determinsitc的,而我们之前提到的算法中, DNN输出的却是determinisitic的,那么训练中的target Q value必然会产生震荡。本节的几篇文章都是围绕着这个问题展开的。
A Distributional Perspective on Reinforcement Learning
C51的解决思路很简单。就是将的值分布视为在之间的51个均匀区间的categorial distribution,如此,则的输出则为概率分布。那么这种情况下,Bellman Equation是如何实现的呢?
如果是一个分布,那么Bellman Equation的RHS: 是对原分布的变形,如原文中的下图所示:
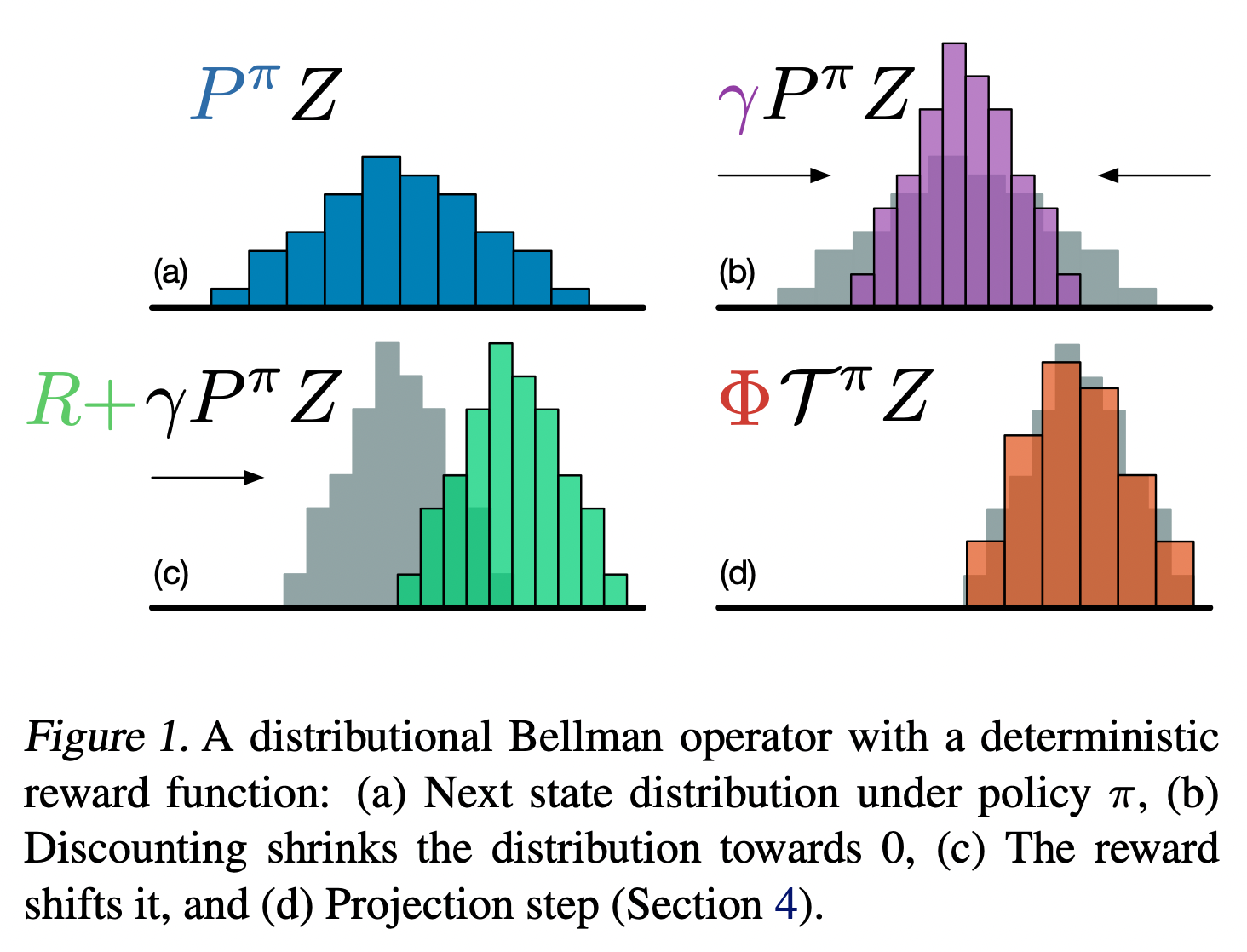
其对应的伪代码如下:
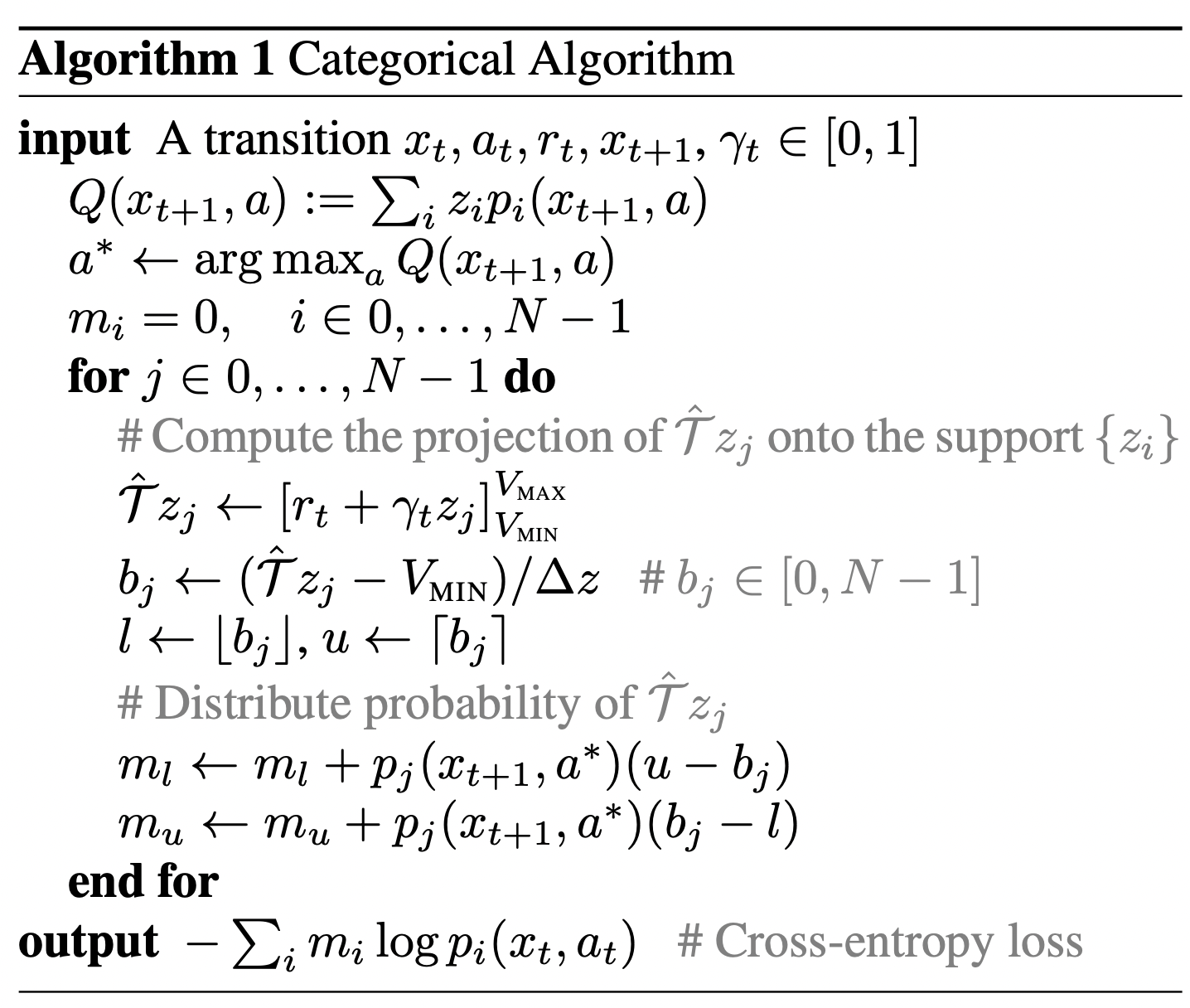
我们接下来一行一行解释以上code。首先,算法规定了的取值范围, 比如, 那么将这个区间平均分成50份,那么一共会有以下51个端点,文中被称为51个support ,这也是算法被简称为C51的由来(51 Categories)。Q Network的output dimension 由原来的变为,且对每一个action对应的 array取softmax以代表categorical probability ,如此,则。
我们以 为例,,这一步就是所谓的compute the projection of on to 。接下来,我们看看何为distribute probability of 。对于, 它在与之间,我们需要将 对应的概率 分配到上,因为到的距离比为,所以将 的分配到上,分配到上,以此类推。然而GPU代码层面要实现以上逻辑会复杂的多,因为涉及到寻找一个batch的index的问题。
经过以上操作,Bellman Equation的RHS和LHS的categorical distribution即有相同的support, 那么两个分布之间的距离即可用cross entropy来衡量,并以此作为loss。
Distributional Reinforcement Learning with Quantile Regression
QR-DQN是在C51的基础上做了稍许改进,甚至和C51一枚硬币的两面。C51中,support是fixed and evenly distributed,Q Network输出的是support对应的probability;而在QRDQN中,probability是fixed and evenly distributed,Q Network输出的是support。
相比起C51,QR-DQN在code层面要简洁和简单很多。以作者的标准算法为例,Q Network的输出为的array,每个action对应的的array即代表quantile distribution的两百个evenly distributed quantiles ,如此则。
那么quantile distributions之间的loss又如何计算呢?文中的下图即是作者的思路。不同于C51中计算又相同support的categorical distribution的cross entropy,QR-DQN想要用quantile distribution去逼近return的真实distribution,计算的是两个distributions的cumulated distribution probability(CDF)之间的1-Wasserstein error。
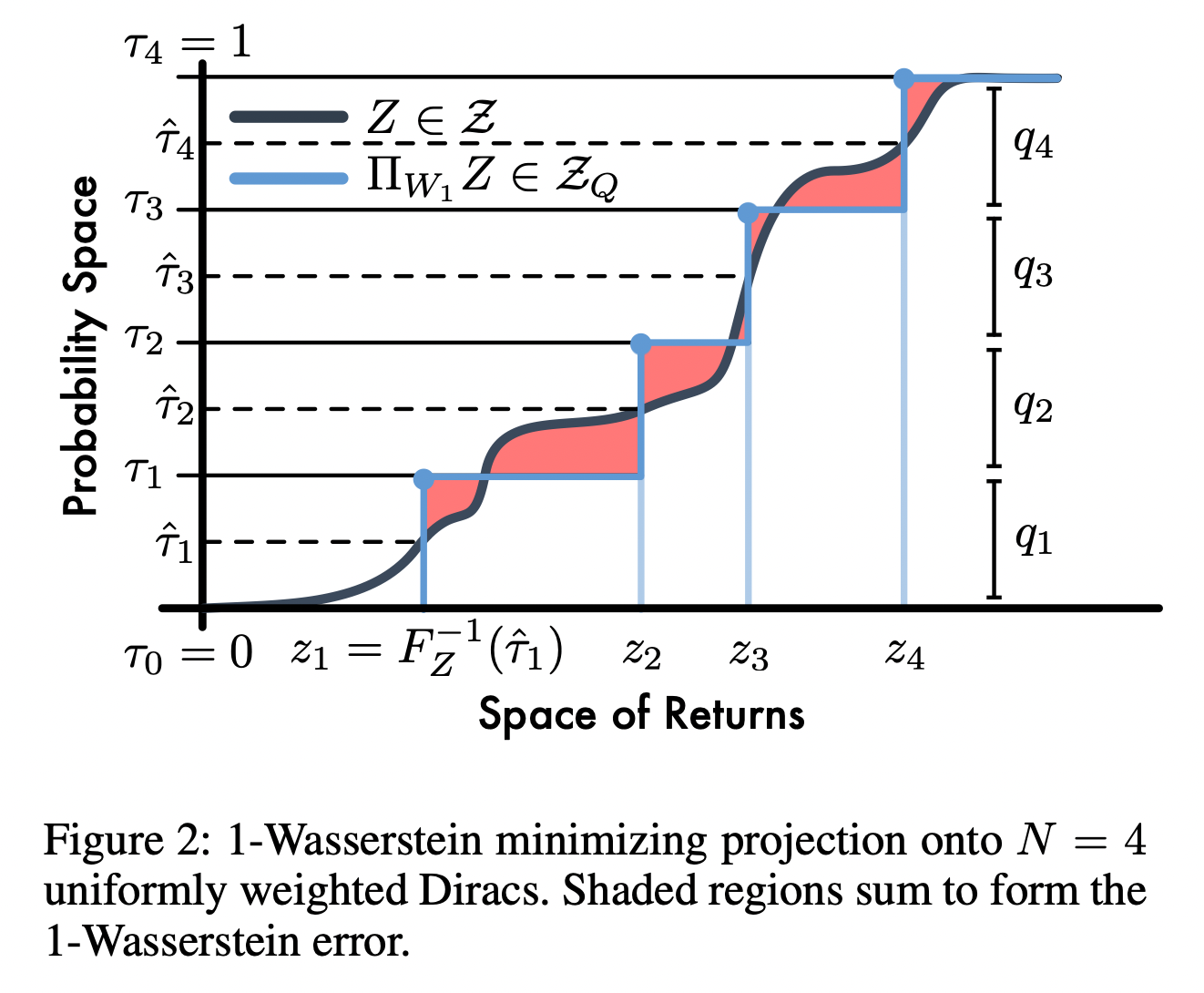
在具体计算中,作者用到了Quantile Regression的概念。所以接下来我们简单介绍下何为Quantile Regression。设random variable 的cumulative distribution function为,我们设分为分位数对应的分位点为,则有,亦或者。
那么问题来了,对于给定的,如何求分位数对应的分位点呢?我们设,则
其中
我们对求导令其为零,则有
即。所以我们最小化,即可求得的分位点。
如果是quantile distribution,那么quantile regression loss为:
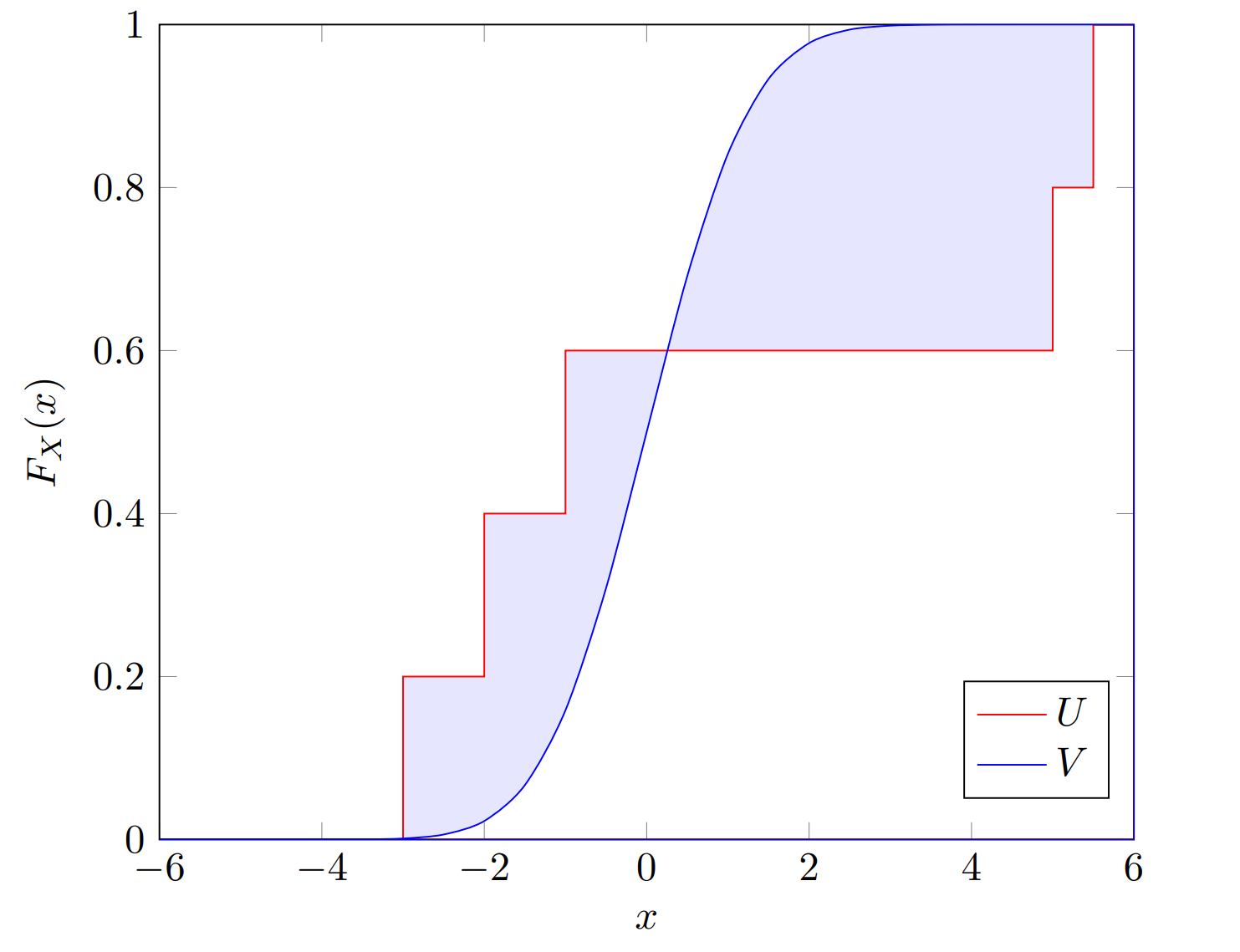
下面举例说明两个quantile distribution之间的QR loss。假设我们有quantile distribution ,其对应的分位数,另有quantile distribution 且,那么之间的Quantile Regression Loss
其对应code为
import torch
p = torch.tensor([-3, -1, 2, 4, 7])
q = torch.tensor([-5, -2, 3, 5, 8])
tau = torch.tensor([0.1, 0.3, 0.5, 0.7, 0.9])
diff = p.view(-1, 1) - q.view(1, -1)
weight = tau - (diff > 0).float()
loss = diff.abs() * weight.abs()
loss = loss.sum(-1).mean(-1)
Implicit Quantile Networks for Distributional Reinforcement Learning
IQN又在QR-DQN的基础上做了改进。我们知道,QR-DQN的分位数是fixed and evenly distributed,所以很自然的想到,有没有办法也让是variable?IQN的思路是在network方面动手,如文中的下图所示。
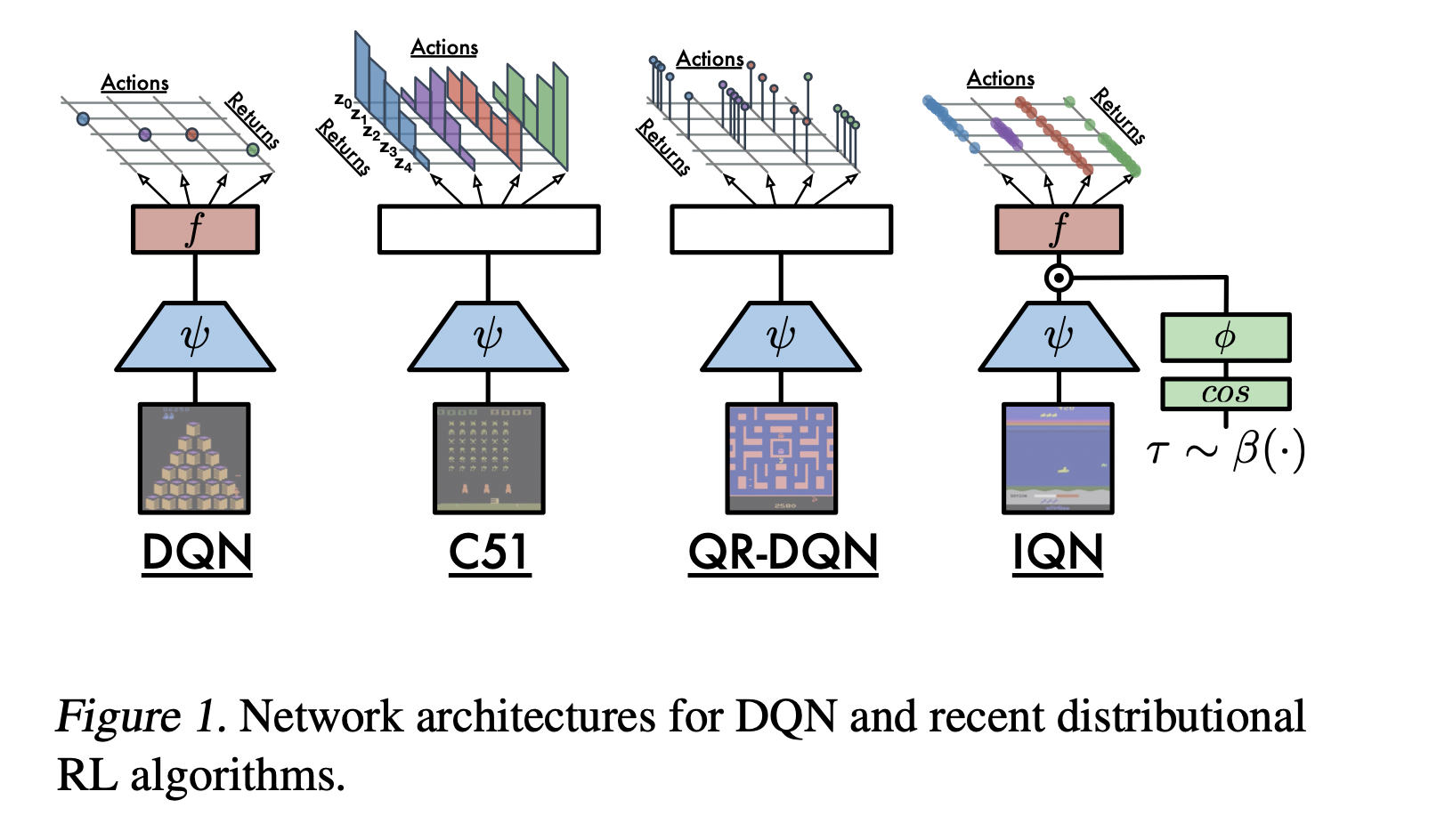
IQN的网络输入,除了RL的state之外,还有一个随机采样的分位数,这个分位数被嵌入到网络中,并与convolution layers出来的feature互动,输出对应的分位点。
import torch
import torch.nn as nn
import numpy as np
class Network(nn.Module):
# ......
def forward(self, states, N):
B = states.size(0) # Batch Size
x = self.convs(states).view(B, -1) # convolution layers
taus = torch.rand(B, N, 1) # Sample taus from uniform distribution
pis = np.pi * torch.arange(1, self.num_cosines + 1).to(x).view(1, 1, -1)
cosine = pis.mul(taus).cos().view(B * N, self.num_cosines)
tau_embed = self.cosine_emb(cosine).view(B, N, -1)
state_embed = x.view(B, 1, -1)
features = (tau_embed * state_embed).view(B * N, -1)
q = self.dense(features).view(B, N, -1) # B x N x |A|
return q, taus
我在上面大概写了下算法对应的python code。网络每forward一次,便输出一个的,以及与其对应的的quantiles,其余部分与QR-DQN相同。很多人会疑惑cosine embed这层的操作,其实这完全是调参试出来的结果,可以在Appendix里面的Figure 5看到,因为加了这个效果更好。
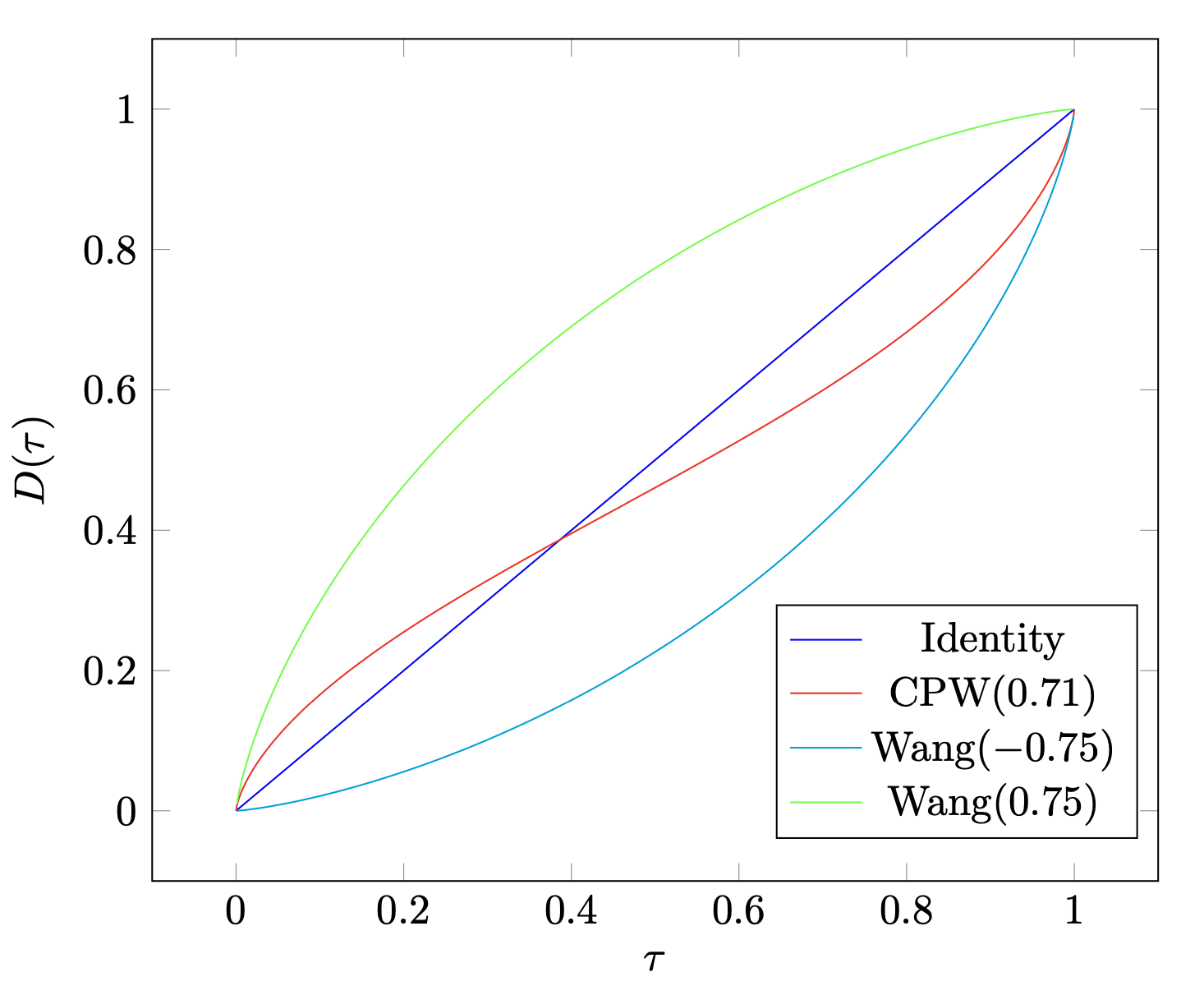
文中花了大量篇幅讲distortion risk measure,作者本期望通过distortion function来调整policy的risk偏好,结果发现还是identity distortion function,即neutral policy的总体效果最好。这里我们也简单解释下何为distortion risk measure。首先,我们需要定义一个distortion function ,且要求是continuous and increasing, 如此则。之前我们提到,对于random variable ,其CDF为,quantile function为,那么distortion risk measure为
而我们知道
对比以上两式我们发现,本质上,distortion risk measure是在将CDF distort之后的expected 。我画出了文中提到的主要的distortion function ,如下图
如果被distort的是normal distribution,那么distort之后的distribution如下
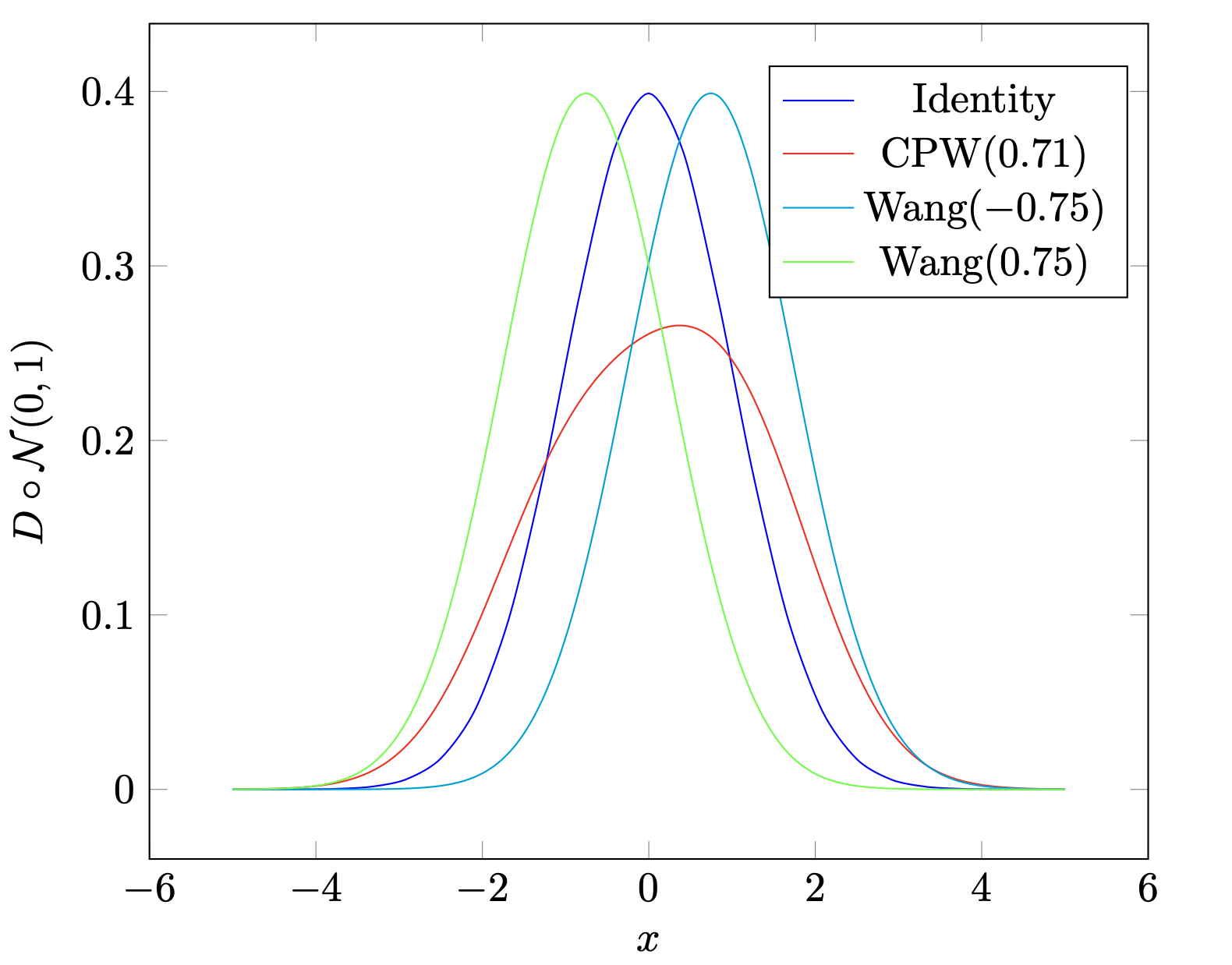
我们接着理解,为什么convex distortion function会给出risk seeking policy而concave distortion function会给出risk averse policy。我们看到,concave的给出的distribution,相对于identity normal distribution而言向右移动了,也就是说,我们的policy更倾向于选higher estimated return的action(即便我们的estimation可能没那么好),而避免选择lower estimated return的action,这就是所谓的risk averse;反之,convex的是risk seeking,也是一样的道理。而这其实就是exploration和exploitation的问题,risk seeking policy更倾向于explore未知的领域,即便它可能带来lower return。但是基于estimated return来判断是否需要explore,这显然不太合适。
Fully Parameterized Quantile Function for Distributional Reinforcement Learning
FQF这篇文章又在IQN的基础上做了改进。我们知道,IQN的分位点是随机采样的,FQF的想法是,应该是根据输入的states产生的。如下图,作者认为,相比于随机采样的,显然经过调整的会使得1-Wasserstein的loss更小。
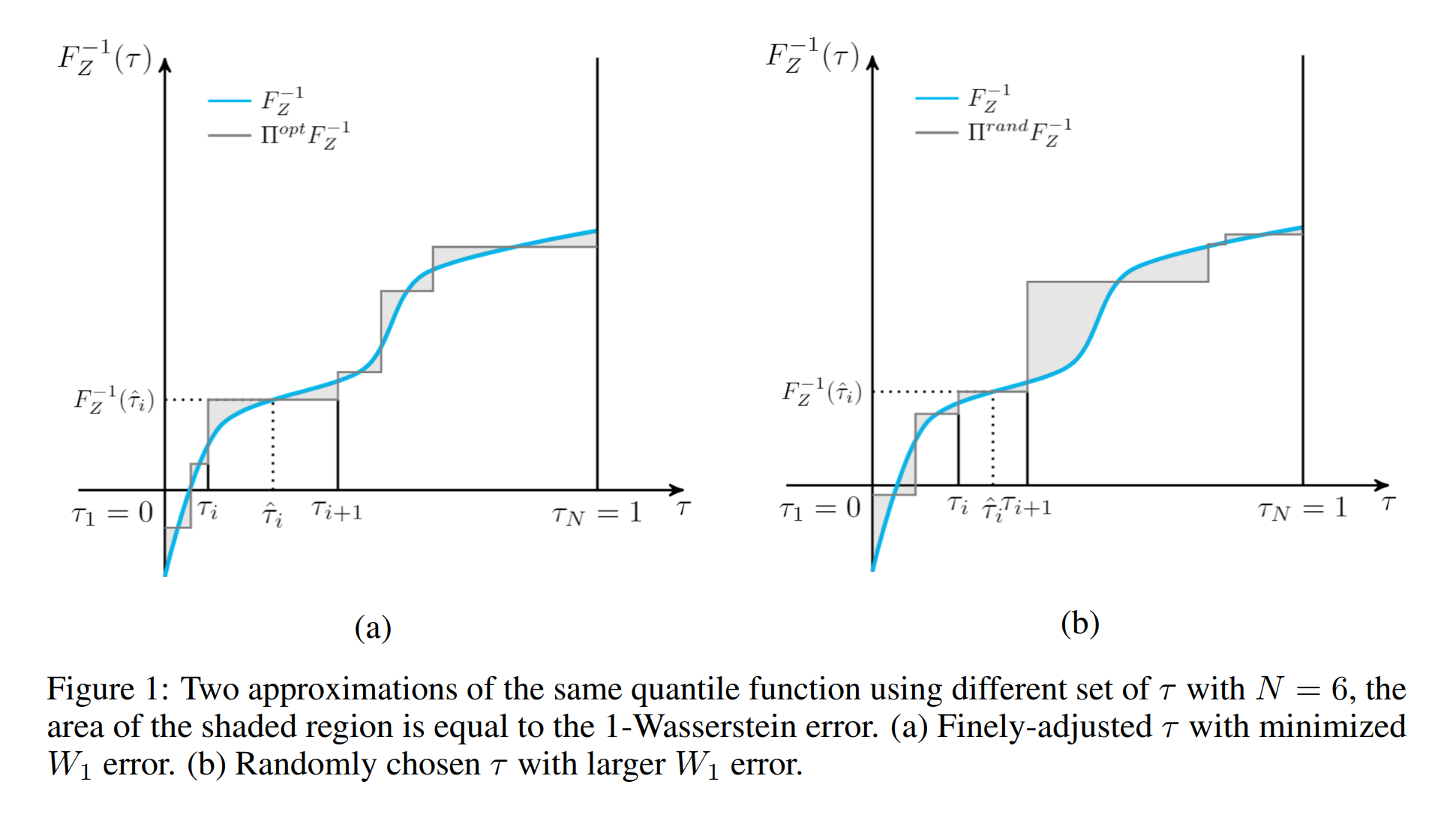
所以接下来要回答的问题是,如何调整。要回答这个问题,需要系统的了解下Wasserstein Distance。
For two distrubtions , their Wasserstein Distance is given by:
where is the inverse CDF of distrubtion , which means
Inverse CDF这里解释的有点绕口,我们知道CDF是PDF(Probability Density Function)的积分: ,Inverse CDF就是CDF的反函数。在下图中:
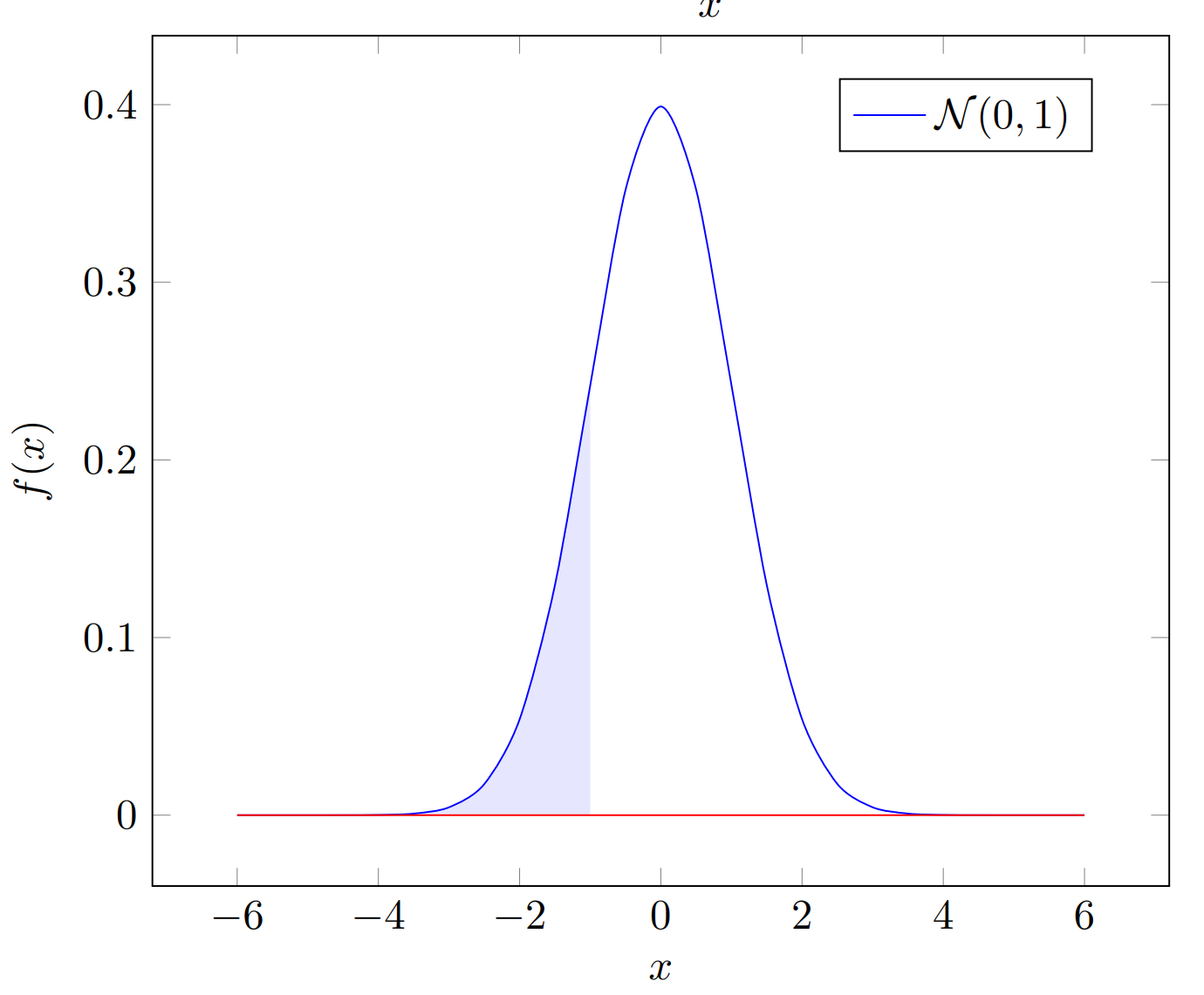
为standard normal distribtuion,涂色面积,那么 。
特殊情况下,如果是quantile distribution with ,那么
如下图的CDF,其中 with and ,涂色部分的面积即为。
问题又来了,如果quantile distribution 的 support 是可调节的,那么如何才能使最小呢?
For any and , and CDF with its inverse , the set of minimizing
is given by
Or
这部分其实很好证明。首先,显然,所以,那么
那么对于上面提到的quantile distribution with quantile fractions and 和 continuous distribution ,
我们设,那么
我们又设 ,那么
上式的证明可参考文章的Appendix,也是FQF算法的核心结论。另外,很容易推出
文章其他部分与IQN相同。我这里摘抄对应的code方便解释。
class Network(nn.Module)
...
def taus_prop(self, x):
batch_size = x.size(0)
log_probs = self.fraction_net(x).log_softmax(dim=-1) # Faction Network: B X F => B X P
probs = log_probs.exp()
tau0 = torch.zeros(batch_size, 1).to(x)
tau_1n = torch.cumsum(probs, dim=-1)
taus = torch.cat((tau0, tau_1n), dim=-1) # B X (P + 1)
taus_hat = (taus[:, :-1] + taus[:, 1:]).detach() / 2.0 # B X P
entropies = probs.mul(log_probs).neg().sum(dim=-1, keepdim=True)
return taus.unsqueeze(-1), taus_hat.unsqueeze(-1), entropies
def calc_fqf_q(self, x):
if st.ndim == 4:
convs = self.convs(st)
else:
convs = st
# taus: B X (N+1) X 1, taus_hats: B X N X 1
taus, tau_hats, _ = self.taus_prop(convs.detach())
q_hats, _ = self.forward(convs, taus=tau_hats)
q = ((taus[:, 1:, :] - taus[:, :-1, :]) * q_hats).sum(dim=1)
return q
def forward(self, x, taus_hat=None):
B = states.size(0) # Batch Size
x = self.convs(states).view(B, -1) # convolution layers, output x: B X F
if taus_hat is None:
_, taus_hat, _ = self.taus_prop(x.detach())
N = taus_hat.size(1)
ipi = np.pi * torch.arange(1, self.cfg.num_cosines + 1).to(x).view(1, 1, self.cfg.num_cosines)
cosine = pis.mul(taus_hat).cos().view(B * N, self.num_cosines)
tau_embed = self.cosine_emb(cosine).view(B, N, -1)
state_embed = x.view(B, 1, -1)
features = (tau_embed * state_embed).view(B * N, -1)
q = self.dense(features).view(B, N, -1) # B x N x |A|
return q, taus_hat
class Agent:
...
def step(self, states, next_states, actions, terminals, rewards):
q_convs = self.model.convs(states)
taus, tau_hats, _ = self.model.taus_prop(q_convs.detach())
# q_hat: B X N X A
q_hat, _ = self.model.forward(q_convs, taus_hat=tau_hats)
q_hat = q_hat[self.batch_indices, :, actions]
with torch.no_grad():
q_next_convs = self.model_target.convs(next_states)
q_next_ = self.model_target.calc_fqf_q(q_next_convs)
a_next = q_next_.argmax(dim=-1)
q_next, _ = self.model_target.forward(q_next_convs, taus=tau_hats)
q_next = q_next[self.batch_indices, :, a_next]
q_target = rewards.unsqueeze(-1).add(
self.cfg.discount ** self.cfg.n_step * (1 - terminals.unsqueeze(-1)) * q_next)
q_current_, q_target_ = q_hat..unsqueeze(1), q_target.unsqueeze(-1)
diff = q_hat.unsqueeze(1) - q_target.unsqueeze(-1)
# q_current_: B X 1 X N
# tau_hats: B X 1 X N
# q_target_: B X N X 1
loss = nn.functional.smooth_l1_loss(diff) * (taus_hat - q_target.lt(q).detach().float()).abs()
# Calculate Fraction Loss
with torch.no_grad():
q, _ = self.model.forward(q_convs, taus_hat=taus[:, 1:-1])
q = q[self.batch_indices, :, actions]
values_1 = q - q_hat[:, :-1]
signs_1 = q.gt(torch.cat((q_hat[:, :1], q[:, :-1]), dim=1))
values_2 = q - q_hat[:, 1:]
signs_2 = q.lt(torch.cat((q[:, 1:], q_hat[:, -1:]), dim=1))
gradients_of_taus = (torch.where(signs_1, values_1, -values_1) + torch.where(signs_2, values_2, -values_2)
).view(self.cfg.batch_size, self.cfg.N_fqf - 1)
fraction_loss = (gradients_of_taus * taus[:, 1:-1, 0]).sum(dim=1).view(-1)
计算Faction Loss之前其实很好懂,相当于用fraction network产生的代替随机生成的,所以我们着重理解Calculate Fraction Loss这部分,对照着其实很好理解。
q其实在计算,q_hat[:, :1]和q_hat[:,1:]对应的是和,gradients_of_taus计算的是
到这里大家可能会疑惑为何不套用解开绝对值之后的公式,原因很简单,因为我们的neural network计算出来的并不是严格的non-decreasing,直接套用会导致梯度计算并不准确。为了解决这一问题,后续有作品提出non-decreasing quantile network,这里就不多说了。