- Published on
图搜索算法 Graph Search
- Authors

- Name
- ZHOU Bin
- @bzhouxyz
我们现实中的很多问题,都可以归纳为图搜索问题,因此它在地图导航,路径规划,游戏AI中得到广泛的应用。而我们在动态规划里面提到的几个问题,其实是图搜索问题的几个特例。这也使得我们有必要单独写一篇介绍这一类问题的算法。
Graph search, also known as graph traversal, refers to the process of visiting each vertex in a graph. Graphs have nodes and edges . Edges can be directed or undirected, weighted or unweighted.
本文将以此介绍一下几个算法:
深度优先搜索 Depth First Search
我们以下图为例
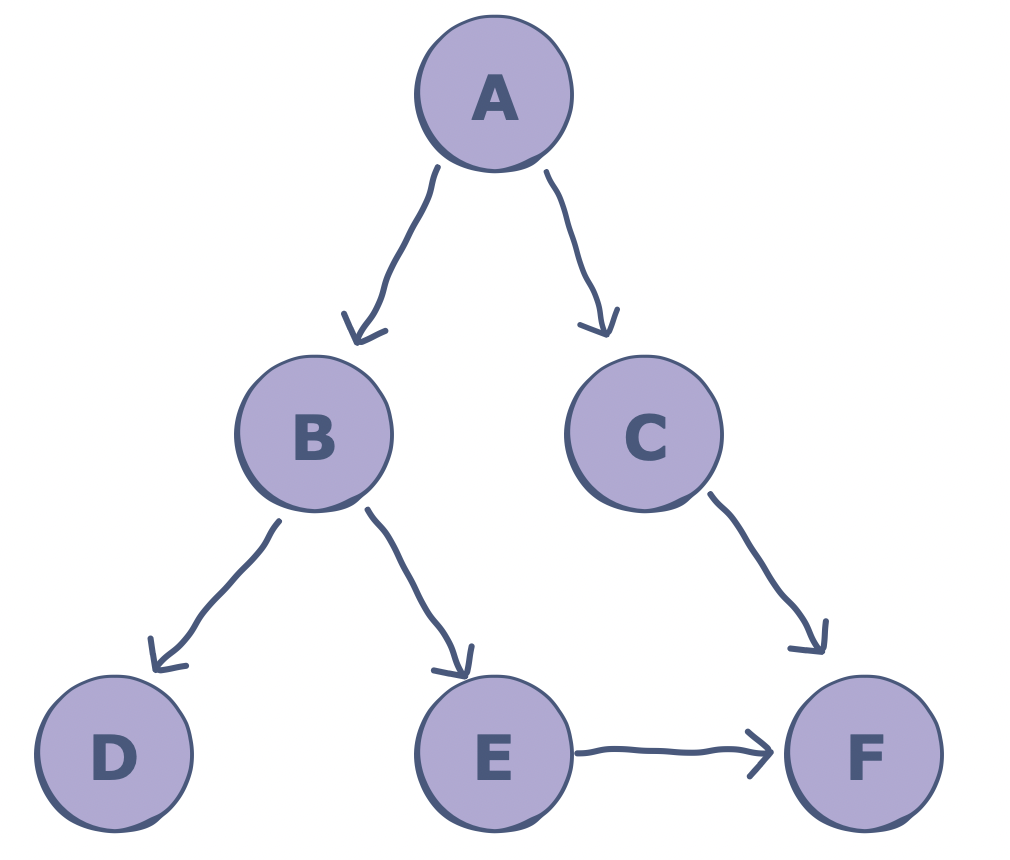
graph = {
'A' : ['B','C'],
'B' : ['D', 'E'],
'C' : ['F'],
'D' : [],
'E' : ['F'],
'F' : []
}
visited = set() # Set to keep track of visited nodes.
def dfs(visited, graph, node):
if node not in visited:
print(node)
visited.add(node)
for neighbour in graph[node]:
dfs(visited, graph, neighbour)
dfs(visited, graph, 'A')
运行的结果是
A
B
D
E
F
C
广度优先搜索 Breadth First Search
同样以上图为例
visited = [] # List to keep track of visited nodes.
queue = [] # Initialize a queue
def bfs(visited, graph, node):
visited.append(node)
queue.append(node)
while queue:
s = queue.pop(0)
print(s)
for neighbour in graph[s]:
if neighbour not in visited:
visited.append(neighbour)
queue.append(neighbour)
# Driver Code
bfs(visited, graph, 'A')
运行的结果是
A
B
C
D
E
F
我们很容易发现,深度优先算法找到的路径并不是最短路径,而广度优先回溯出来的的才是。后面介绍的Dijkstra's Algorithm和A* Algorithm就是基于BFS的算法。
戴克斯特拉算法 Dijkstra's Algorithm
BFS与其说是找的最短路径,不如说是找的最少途径点,因为graph中所有的edge权值相等。这就导致了其应用的局限性。现实中,比如城市中两地间的交通,距离路况等等,都影响我们的选择,这时候BFS就不适用了。
我们以下图为例:

要求从 点出发,找到其他所有点到 点的最优路径,我们设 为 的邻点。
- 数组已记录的 到 的最优距离;
- 集合, 代表已经访问过的节点。
- 集合, 代表正在访问的节点。
from collections import defaultdict
graph = {
'a': {'c': 20, 'b': 10},
'b': {'e': 10, 'd': 50},
'c': {'e': 33, 'd': 20},
'd': {'e': 20, 'f': 2},
'e': {'f': 1},
'f': {}
}
def dijkstra(g, s):
D = defaultdict(lambda: float('inf'))
P = {}
S = [s]
V = {}
D[s] = 0
while len(S) > 0:
node = S.pop(0)
for v in g[node]:
if v not in D or D[node] + g[node][v] < D[v]:
D[v] = D[node] + g[node][v]
P[v] = node
if v not in V:
S.append(v)
V[node] = 0
print(D)
print(P)
dijkstra(graph, 'a')
A*算法 A-Star Algorithm
很显然,随着节点数目的增多,Dijkstra算法需要考察的节点数目从起点层层往外增加。如果平均每个节点的子节点数目为,节点总数为的话,那么算法的平均搜索深度为,在最深处,需要考察的节点数目为。为了提高其搜索效率,有算法提出从起点和终点同时搜索,这其实相当于给搜索指定了方向。所以更聪明的算法呼之欲出,即本文的主角A*算法。
A* 算法是一种启发式搜索算法,所谓启发式,其实是在评估路径的时候用了一个启发函数,A算法对节点的评估函数
这里 是起点到节点的最优距离,即上文中Dijkstra算法中的, 是对节点到目标节点的估算距离。A*算法会优先考察最小的节点。值得注意的是:
- 如果, 本算法即为最佳搜索优先算法BFS,速度最快,但解不是最优。
- 如果, 本算法即为Dijkstra算法,计算的节点最多。
- 的选取,常用的有欧式距离(L2)和曼哈顿距离(L1)。
因为算法对的需要,这也使得A*更适合在有障碍物的网格类问题中得到应用。
import numpy as np
from collections import defaultdict
class AStar:
def __init__(self):
self.H = 30
self.W = 30
self.S = (15, 17)
self.T = (15, 25)
graph = np.chararray((self.H, self.W))
graph[:, :] = '.'
graph[5:25, 20] = 'H'
graph[5, 10:20] = 'H'
graph[25, 10:21] = 'H'
graph[self.S] = 'S'
graph[self.T] = 'T'
self.g = graph
def distance(self, x, y):
return np.abs(x[0] - y[0]) + np.abs(x[1] - y[1])
def neighbors(self, node):
x, y = node
offset = [(-1, 0), (1, 0), (0, 1), (0, -1)]
out = []
for dx, dy in offset:
ix, iy = x+dx, y+dy
if 0 <= ix < self.H and 0 <= iy < self.H:
if self.g[ix, iy].decode('utf-8') != 'H':
out.append((ix, iy))
return out
def tostring(self, g=None):
if g is None:
g = self.g
out = ""
for i in range(self.H):
out += " ".join([str(x, encoding='utf-8') for x in g[i]])
out += '\n'
return out
def solve(self):
print("Astar Path Finding")
print("H standds for wall, S stands for source, T stands for target")
print(self.tostring())
D = defaultdict(lambda: float('inf'))
D[self.S] = 0
P = {}
S = {self.S: 0}
V = {}
count = 0
while self.T not in S:
node = min(S, key=S.get)
if node == self.T:
break
for v in self.neighbors(node):
if v not in D or D[v] > D[node] + 1:
D[v] = D[node] + 1
P[v] = node
if v not in V:
S[v] = D[v] + self.distance(v, self.T)
V[node] = 0
del S[node]
print("Finding path ...")
print()
print()
print('Path found, represented by *')
gx = np.copy(self.g)
v = self.T
while v in P:
v = P[v]
gx[v] = '*'
# for k in S: gx[k] = 'O'
# for k in V: gx[k] = 'X'
print(self.tostring(gx))
s = AStar()
s.solve()
运行的结果如下:
Astar Path Finding
H standds for wall, S stands for source, T stands for target
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . H H H H H H H H H H H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . S . . H . . . . T . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . H H H H H H H H H H H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Finding path ...
Path found, represented by *
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . * * * * * * * * * * * * * . . . . . . . .
. . . . . . . . . * H H H H H H H H H H H * . . . . . . . .
. . . . . . . . . * * * * * * * * * . . H * . . . . . . . .
. . . . . . . . . . . . . . . . . * . . H * . . . . . . . .
. . . . . . . . . . . . . . . . . * . . H * . . . . . . . .
. . . . . . . . . . . . . . . . . * . . H * . . . . . . . .
. . . . . . . . . . . . . . . . . * . . H * . . . . . . . .
. . . . . . . . . . . . . . . . . * . . H * . . . . . . . .
. . . . . . . . . . . . . . . . . * . . H * . . . . . . . .
. . . . . . . . . . . . . . . . . * . . H * . . . . . . . .
. . . . . . . . . . . . . . . . . * . . H * . . . . . . . .
. . . . . . . . . . . . . . . . . * . . H * * * * T . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . H . . . . . . . . .
. . . . . . . . . . H H H H H H H H H H H . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .